
Got a couple of thousand dollars and a bargain of engineering proficiency? You’re in luck: Stanford trainees have actually developed a quadrupedal robotic platform called Doggo that you can construct with off-the-shelf parts and a significant quantity of effort. That’s much better than the options, which normally need a hundred grand and a government-sponsored laboratory.
Due to exist ( paper on arXiv here ) at the IEEE International Conference on Robots and Automation, Doggo is the outcome of research study by the Stanford Robotics Club, particularly the Extreme Mobility group. The concept was to make a contemporary quadrupedal platform that others might evaluate and construct on, however keep expenses and custom-made parts to a minimum.
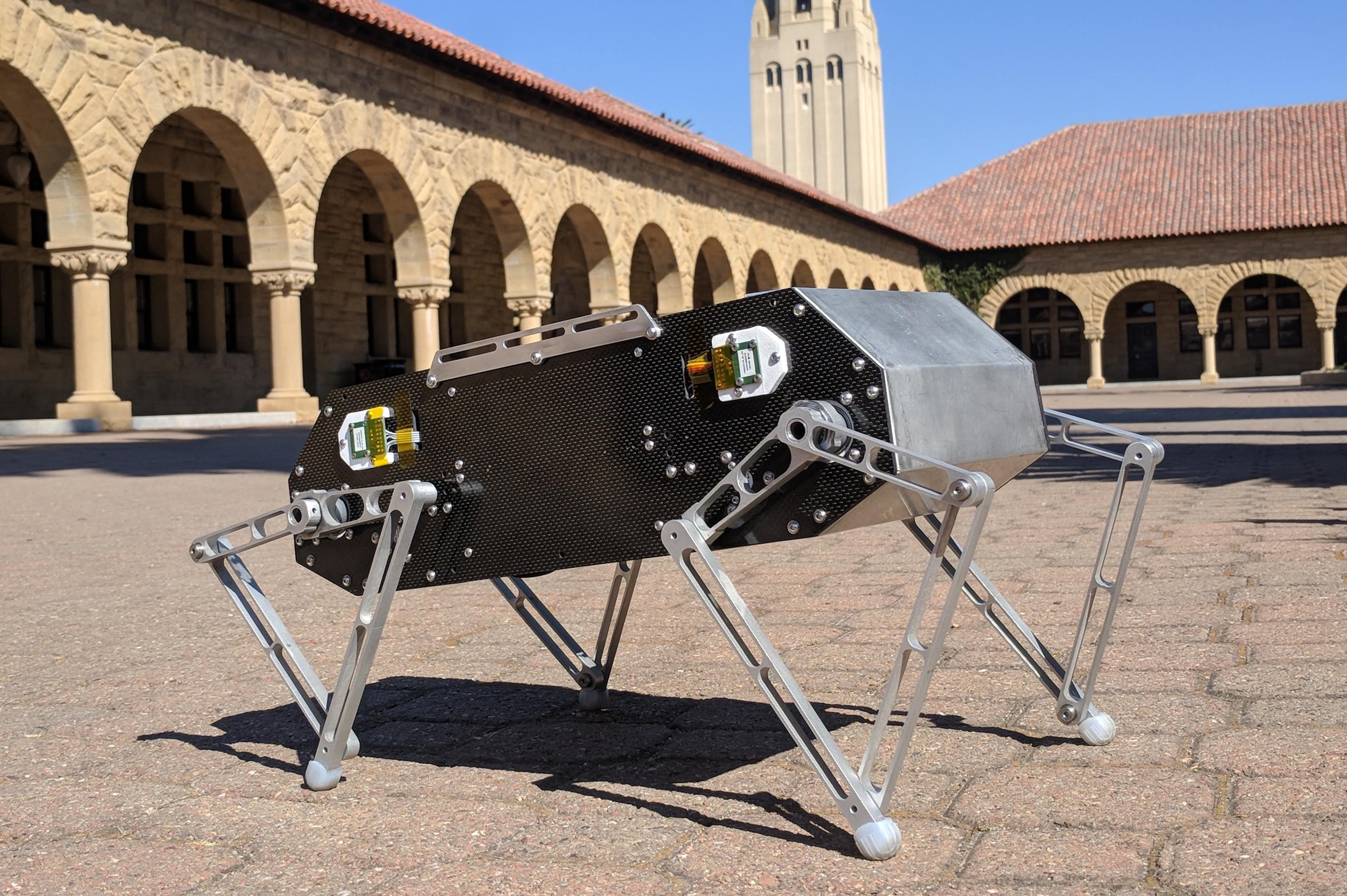 The outcome is a charming little bot with remarkably certified however rigid-looking polygonal legs that has a jaunty, bouncy little walk and can jump more than 3 feet in the air. There are no physical springs or shocks included, however by tasting the forces on the legs 8,000 times per 2nd and reacting as rapidly, the motors can imitate virtual springs.
The outcome is a charming little bot with remarkably certified however rigid-looking polygonal legs that has a jaunty, bouncy little walk and can jump more than 3 feet in the air. There are no physical springs or shocks included, however by tasting the forces on the legs 8,000 times per 2nd and reacting as rapidly, the motors can imitate virtual springs.
It’s restricted in its autonomy, however that’s since it’s constructed to move, not to comprehend the world and see around it. That is, nevertheless, something you, dear reader, might deal with. It might be a great basis for research study at other robotics departments due to the fact that it’s reasonably inexpensive and does not include some unique motor or exclusive parts. You can see the parts and styles essential to construct your own Doggo right here .
“We had actually seen these other quadruped robotics utilized in research study, however they weren’ t something that you might bring into your own laboratory and usage for your own jobs,” stated Doggo lead Nathan Kau in a Stanford news post . “We desired Stanford Doggo to be this open source robotic that you might construct yourself on a reasonably little budget plan.”
In the meantime the Extreme Mobility group will be both enhancing on the abilities of Doggo by working together with the university’s Robotic Exploration Lab, and likewise dealing with a comparable robotic however two times the size — Woofer.
Recent Comments